

Sommaire

Indicateurs de performance
Les indicateurs de performances sont principalement :
- le temps d’attente moyen maximum probable (= “l’intervalle”) en secondes,
- le temps nominal d’une course en secondes,
- le débit relatif du trafic, exprimé par le pourcentage du nombre d’occupants maximum du bâtiment déplacé en 5 minutes.
Intervalle et temps nominal d’une course
Dans une étude de dimensionnement, un constructeur définit ses critères de performance. Ils sont traduits sous forme d’un tableau de satisfaction comme représenté ci-dessous :
| Niveau de qualité | Intervalle [s] | Temps nominal d’une course [s] Moyenne | |
| Entrant uniquement | Double sens | ||
| Excellent | 20-25 | 25-32 | 15-20 |
| Bon | 25-32 | 32-40 | 20-25 |
| Satisfaisant | 32-40 | 40-50 | 25-32 |
Débit relatif du trafic
Le débit relatif du trafic est fonction :
- du type de bâtiment,
- du type d’occupation des niveaux (fixe, à temps partiel, occasionnel, …),
- de la présence de un ou plusieurs services différents avec des horaires différents.
| Débit relatif du trafic (relative handling capacity) [% du total de la population en 5 min.] |
||||
| Type de bâtiments | Services occupant le bâtiment | Type d’occupation | Niveau de qualité | |
| Bon | Excellent | |||
| Bureau | Un seul service | Fixe | 16-20 | 20-25 |
| Flexible | 13-16 | 16-20 | ||
| Plusieurs services | Fixe | 13-16 | 16-20 | |
| Flexible | 12-15 | 15-18 | ||
| Hébergement | 12-16 | 16-18 | ||
| Hôpital | 13-16 | 16-20 | ||
Dimensionnement
1. Dimensionnement général de l’installation
Un préalable consiste à déterminer le type d’ascenseur que le maître d’ouvrage et le maître d’œuvre voudraient placer dans l’immeuble, connaissant les données constructives (nombre d’étages, type d’occupation, confort à atteindre, …).
Ce choix fixé, les fabricants ou les bureaux d’étude sont à même de déterminer, en fonction d’hypothèses prises sur la configuration de l’ascenseur (vitesse, accélération, …) et de données constructives du bâtiment, le nombre d’ascenseurs nécessaires pour atteindre les performances recommandées. Ces calculs sont basés sur des données statistiques d’utilisation d’ascenseurs.
D’autres paramètres de bonne pratique permettent de simplifier le dimensionnement ou de mieux cibler le choix des équipements. Le tableau ci-dessous reprend ces ordres de grandeur :
| Paramètres | Types d’immeuble | ||
| Résidentiel | Tertiaire | Tour | |
| Nombre de courses annuel | < 200 000 | < 400 000 | < 800 000 |
| Nombre de cycles/h max. | 180 | 240 | 240 |
Pour donner les bases d’un dimensionnement, comme opéré par un constructeur, prenons un exemple simple :
|
Données Soit un ascenseur d’immeuble de bureaux, occupé par un seul service dont les employés travaillent, pour la plupart, avec un horaire flexible. Les données constructives de l’immeuble sont les suivantes :
Pour lancer la première itération, le constructeur propose les données suivantes au niveau de l’ascenseur :
Simulation Les résultats de la simulation sont les suivants :
Ces résultats sont comparés aux recommandations de performance; le but étant d’atteindre une performance acceptable tant au niveau du temps nominal et de l’intervalle de course que du débit relatif de trafic. Le résultat de la simulation estime donc la performance excellente (en analysant les critères de performance ci-dessus) pour autant que le bâtiment soit équipé de 3 ascenseurs avec les caractéristiques énumérées ci-dessus. Si les résultats des calculs estimaient la performance médiocre, il eut été nécessaire de relancer une itération avec un nombre d’ascenseurs supérieur par exemple, tout en sachant que le maître d’ouvrage cherche toujours, à juste titre, à limiter l’investissement. Il va de soi aussi que l’amélioration de la performance ne doit pas se faire au détriment du confort des utilisateurs et de la performance énergétique comme, par exemple, augmenter la vitesse et l’accélération de la cabine. La simulation peut aussi donner des résultats auxiliaires tels que :
Interprétation des résultats D’autres résultats peuvent encore être sortis de la simulation tels que :
Ces informations sont très précieuses pour les constructeurs et les installateurs mais, cependant, sortent du cadre du dimensionnement vu du côté du maître d’ouvrage. Le graphique suivant donne une idée des zones de performance des intervalles et des débits relatifs en fonction du facteur de remplissage de la cabine :
Graphique de performance : trafic entrant. Le graphique suivant montre la performance des temps de course en fonction de la vitesse nominale.
Graphique de temps de course nominale. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Cet exemple simplifié montre que le dimensionnement d’ascenseurs constitue un défi de taille. La difficulté ne réside pas nécessairement dans le dimensionnement par rapport aux données constructives de l’immeuble mais dans l’évaluation de l’occupation probable du bâtiment. Pour passer l’écueil :
- Il faut préparer correctement l’esquisse par l’étude approfondie du programme d’occupation des étages.
- Il est nécessaire de tenir compte du nombre de destinations probables (Rez-de-Chaussée, parking souterrain, cafétéria, …) et de leur emplacement.
2. Dimensionnement de la motorisation
Quel que soit le type de motorisation, il faut partir du dimensionnement des différents équipements. À partir de la connaissance des caractéristiques de la charge (couple, vitesse et puissance mécanique nécessaire), le réducteur éventuel, le moteur électrique et le système de démarrage et de régulation de la vitesse peuvent être dimensionnés.
Couple et puissance mécanique nécessaires en fonction du type de charge
Le couple de démarrage de la motorisation doit être suffisant pour mettre en mouvement la charge de l’ascenseur.
On considère que les caractéristiques de la motorisation sont une corrélation entre :
- le couple,
- la vitesse,
- la puissance mécanique.
Suivant le type de motorisation, les profils des courbes du couple et de la puissance mécanique en fonction de la vitesse de rotation sont spécifiques.
Typiquement, pour le couple :
- Les motorisations à traction ont un profil de couple constant, quelle que soit la vitesse de rotation.
- Les motorisations hydrauliques, quant à elle, ont un profil de couple quadratique (C = f(n²)).
Quant à la puissance mécanique :
- Les motorisations à traction ont un profil de puissance proportionnel à la vitesse de rotation de la roue.
- Les motorisations hydrauliques, quant à elles, ont un profil de puissance proportionnel au cube de la vitesse de rotation de la roue.
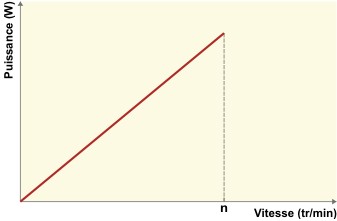
Courbes caractéristiques pour une motorisation à traction.
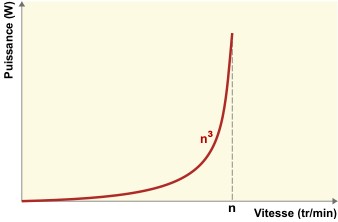
Courbes caractéristiques pour une motorisation hydraulique.
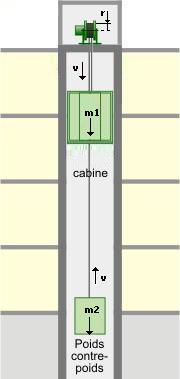
| Exemple de calcul du couple et de la puissance nécessaires à la sortie d’une motorisation à traction.
De manière simplifiée, le couple est calculé comme suit :
C = m x a x r où :
À noter qu’il faudrait aussi tenir compte des différentes inerties de la motorisation, du poids du câble, …, mais cela sort du cadre de ce chapitre. Quant à la puissance mécanique à l’arbre, elle est approchée comme suit : P = C x ω où :
|
Dans le cas des ascenseurs à traction, le couple résistant reste pratiquement constant en fonction de la vitesse, tandis que la puissance nécessaire à l’arbre est, quant à elle, proportionnelle à cette même vitesse; c’est ce que l’on demande souvent au variateur de vitesse comme mode de fonctionnement.
Dimensionnement du moteur électrique
Par exemple, le dimensionnement d’un moteur asynchrone se résume, en simplifiant, à déterminer le couple nécessaire à déplacer la charge à vitesse nominale ; c’est le couple nominal. On en déduit une puissance nominale mécanique qui va déterminer le choix du moteur. Il faut aussi tenir compte qu’un couple additionnel doit être disponible (sur toute la plage de vitesse) entre le couple de démarrage et celui de la vitesse nominale ; c’est ce surcouple qui assure l’accélération.
Lorsque le couple de démarrage de la charge est supérieur à celui du moteur, il ne démarre pas. Dans le cas des ascenseurs à traction, le couple de démarrage de la charge peut être important (réducteur à vis sans fin par exemple).
3. Dimensionnement du démarreur
Couple du moteur électrique
À l’heure actuelle, concevoir un nouveau projet d’ascenseur sans prévoir leur commmande et leur régulation de vitesse par un variateur électronique de fréquence, ruine tout espoir de gestion énergétique efficace et d’optimisation du confort des utilisateurs.
Jusqu’il y a peu, le dimensionnement du variateur de vitesse par rapport au moteur électrique était très délicat. En effet, dans le cas des ascenseurs dont la charge varie continuellement presque à chaque démarrage, les fonctions telles que les compensations de démarrage (adaptation de la tension) et de glissement (charge variable) était peu maîtrisées. Aujourd’hui, ces fonctions de compensations sont automatiquement adaptées en temps réel en mesurant les paramètres de fréquence, de tension et de courant alimentant le moteur.
Couple du moteur
Le dimensionnement du variateur tient compte du couple à délivrer au moteur afin que celui-ci puisse répondre aux exigences de la charge utile en optimisant l’appel de puissance.
Dans le cas d’un moteur courant de type asynchrone ou synchrone, le couple est fonction du fluentreferx dans l’entrefer et du courant induit :
|
C [Nm] = Φ (Weber] x I[A] où :
|
Fonctionnement du variateur de fréquence
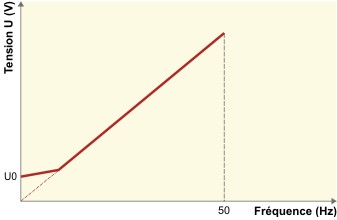
Pour optimiser le couple du moteur, le variateur en fréquence et tension maintien le rapport U/f constant en adaptant la tension U proportionnellement à la fréquence f délivrée au moteur (Φ~ U/f).
|
Courbes caractéristiques d’une régulation U/f constant. Pour les démarrages lourds (motorisation à réducteur à vis sans fin par exemple), le démarrage s’effectue initialement en tension U0. |
Couple de démarrage du variateur de vitesse
Comme on l’a vu précédemment, la caractéristique de charge de l’ascenseur est différente suivant le type d’ascenseur :
- Pour l’ascenseur à traction, le couple reste constant quelle que soit la vitesse.
- Pour l’ascenseur hydraulique, le couple varie de manière quadratique (le couple est fonction de la vitesse au carré).
Le couple de démarrage du variateur de vitesse doit être adapté en fonction de la caractéristique de charge :
- Pour une motorisation hydraulique, la plage de variation du couple des pompes, en fonctionnement normal, se situe entre 30 et 80 % du couple nominal. Un dimensionnement énergétiquement intéressant du variateur de fréquence serait de considérer que le couple nominal pourrait être calé à 80 % sachant que les variateurs sont capables de fournir brièvement un surcouple de 160 %.
- Pour une motorisation à traction, le couple à 100 % du variateur doit être proche du couple nominal de la charge. Un surcouple de démarrage à 160 % est nécessaire pour les charges importantes (motorisation avec réducteur à vis sans fin par exemple).
Puissance du variateur de vitesse
Une fois la caractéristique de charge du variateur de vitesse déterminée, le dimensionnement de la puissance du variateur de vitesse peut s’effectuer selon 4 méthodes :
- La détermination du courant absorbé par le moteur à charge nominale correspond à celui du courant que peut fournir le variateur.
- La détermination de la puissance apparente “S” du moteur à charge nominale correspond à celle du variateur :
| Smoteur = Svariateur = U x I x racine de 3 /1000 |
- La détermination de la puissance mécanique du moteur à charge nominale permet de connaître la puissance apparente du variateur :
| Svariateur = Puissance mécanique / rendement cos phi |
- Suivant la puissance normalisée du moteur asynchrone par exemple, on peut déterminer celle du variateur.
4. Dimensionnement de l’installation électrique
Du choix de la motorisation et de son dimensionnement, il en découle celui de l’installation électrique de puissance. C’est à ce stade qu’un choix erroné :
- Entraîne, en cas de surdimensionnement de l’installation, des investissements plus conséquents et une réservation de puissance surévaluée auprès du distributeur d’électricité.
- Risque de provoquer des perturbations sur le réseau électrique telles que les chutes de tension en ligne, soit en cas de sous-dimensionnement de l’installation électrique interne au bâtiment, soit en cas de sous-évaluation de la réserve de puissance souscrite au distributeur d’électricité.
Le tableau suivant montre que le calibre de la protection moteur d’une motorisation sans réducteur, et commandé par variateur de fréquence, permet de dimensionner l’installation électrique presque comme un circuit classique triphasé de faible puissance.
| Type de motorisation | |||
| Paramètres | Hydraulique | Traction classique | Gearless |
| Vitesse de déplacement de la cabine [m/s] | 0,63 | 1 | 1 |
| Charge de l’ascenseur [kg] | 630 | 630 | 630 |
| Puissance du moteur électrique [kW] | 11 | 5,5 | 3,3 |
| Calibre de la protection moteur [A] | 50 | 35 | 16 |
5. Rôle du maître d’ouvrage dans tout cela ?
Le rôle du maître d’ouvrage dans le dmensionnement proprement dit est limité. Toutefois, il doit garder en mémoire les ordres de grandeurs de dimensionnement repris ci-dessus. Il doit aussi demander à l’installateur de lui fournir le détail des résultats des simulations avec les explications adéquates simplifiées qui justifient le choix de la motorisation, de l’installation électrique, …
Considérations énergétiques de dimensionnement
Comme on l’a vu précédemment, le nombre d’ascenseurs dans un bâtiment, leur charge utile et leur vitesse sont sélectionnés sur la base de calculs de trafic.
La charge utile et la vitesse sont les principaux facteurs qui déterminent :
- la puissance nécessaire à la motorisation pour permettre à la cabine d’effectuer ses déplacements verticaux,
- la consommation d’énergie par course,
- le courant de démarrage, et par conséquent l’appel de puissance influencant la pointe quart-horaire,
- …
1. Vitesse de la cabine
Dans les bâtiments tertaires, la capacité de transport d’un ascenseur n’est pas du tout proportionnelle à sa vitesse (pertes de temps lors du chargement, fermeture des portes, accélération, freinage, ouverture des portes, déchargement).

| Exemple.
Au lieu de la vitesse très largement répandue de 1,0 m/s pour des maisons d’habitation avec 3 à 5 arrêts, on peut opter pour une vitesse de 0,63 m/s. La capacité de transport n’est ainsi que faiblement réduite, les temps d’attente et la durée de la course ne sont majorés que de quelques secondes. La puissance du moteur et le courant de démarrage sont par contre diminués d’environ 35 %. Dans les immeubles tertiaires, l’occupation plus importante encore réduit l’importance de la vitesse de déplacement par rapport au temps d’immobilisation de la cabine. |
Au niveau du dimensionnement, il est intéressant de considérer cette réduction de vitesse en l’introduisant dans le simulateur afin de voir les différences de performances; demandez-le aux constructeurs. Si les différences de performances ne sont pas probantes, pourquoi ne pas prévoir d’emblée un fonctionnement des ascenseurs à vitesse réduite; cela permettrait de dimensionner toute l’installation électrique et la motorisation au plus juste.
2. Motorisation


La consommation d’énergie et les courants de démarrage sont déterminés par le système d’entraînement. L’importance des chutes de tension au démarrage dépend non seulement du système d’entraînement mais aussi des caractéristiques du réseau amont.
Un plus faible appel de puissance au démarrage et pendant une course à vitesse constante se traduit par :
- des taxes de raccordement plus avantageuses (réserve de puissance moindre, compteur moins puissant, …),
- une installation électrique plus économique (câbles de plus faible section, fusibles, etc.),
- de plus faibles chutes de tension (scintillement),
- des pertes dans le réseau d’alimentation moins importantes (les pertes augmentent avec le carré de l’ampérage),
- un besoin plus faible de puissance de groupe électrogène (si présent ou à dimensionner).
L’utilisation de motorisation avec variateur de vitesse permet des courants de démarrage maîtrisés. Les sollicitations mécaniques du moteur sont par ailleurs fortement atténuées, facteur important dans le contexte de la longévité et de la fiabilité des systèmes de motorisation. Une grande longévité se traduit également par des économies d’énergie (grise) et des économies sur les coûts.

3. Nombre de démarrage
Le nombre de démarrages par heure ou par jour permet de déterminer la consommation moyenne ainsi que la chute de tension admissible au démarrage sur le réseau d’alimentation. Sur la base de ces données, on peut ensuite déterminer le dimensionnement correspondant des installations électriques nécessaires. Il est également possible d’en déduire le coût de la consommation d’énergie et le montant de la réserve de puissance à consentir. Il est ainsi possible de comparer la rentabilité des systèmes d’entraînement.
4. Système de commande et de gestion, et auxiliaires
Le système de commande
Le système de commande de l’ascenseur engendre une consommation permanente de courant (ventilation des armoires de commande et de la motorisation, commandes électromécaniques, …) mais permet également de réduire la consommation d’énergie pour l’exploitation de l’ascenseur. Un système de commande et de gestion par ordinateur ou automatique risque de consommer plus; mais cette consommation n’a rien à voir avec le nombre d’appels de cabine réduit pour une même fréquentation de l’immeuble.
Il est intéressant pour le maître d’ouvrage ou le responsable énergie de connaître les consommations des auxiliaires; ne pas hésiter à le demander (dans le cahier des charges par exemple).
L’éclairage

Un éclairage automatique de la cabine en lieu et place d’un éclairage permanent et le juste dimensionnement du luminaire en fonction du niveau d’éclairement recommandé par la norme (50 lux), autorise des économies relativement importantes sur la consommation d’énergie.
| Pour en savoir plus sur le choix de l’éclairage. |





Auteur : les anciens
Mars 2009 : Thibaud
Notes :
Juin 2009 : mise en page et liens internes, Sylvie