

Sommaire

Principe
Ainsi, il existe plusieurs techniques de régulation du débit :
Régulation par étranglement
Il s’agit là du système le plus simple et le moins onéreux pour faire varier un débit. Grâce à un registre (appelé registre de laminage) placé dans un conduit d’air, on peut augmenter ou diminuer la perte de charge de l’installation. Le positionnement du registre peut se faire tant manuellement qu’automatiquement au moyen d’un servomoteur.

Régulateur automatique de débit.
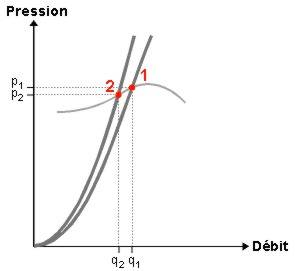
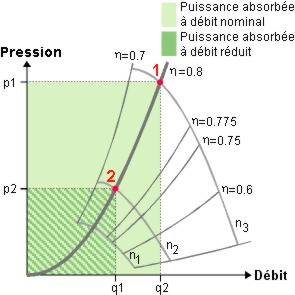
Par exemple, si le registre se ferme, le point de fonctionnement de l’installation va passer de 1 à 2 par suite du laminage, ce qui va conduire à une modification de la courbe caractéristique du circuit (elle se redresse). Pour les ventilateurs à courbe caractéristique fort pentue, on constate qu’une augmentation de perte de charge relativement importante va entraîner une diminution de débit comparativement faible, ce débit-volume passant de q1 à q2. Pour avoir un réglage significatif, le clapet d’étranglement devra souvent fonctionner proche de la fermeture, avec les risques de bruit important que cela comporte. Le rectangle hachuré compris entre de p2 et p3 est considéré comme la perte du système de réglage par rapport au réglage optimum représenté par le point de fonctionnement 3.

Le ventilateur à aubes recourbées vers l’avant, ayant une courbe caractéristique plus plate, est mieux adapté à une régulation par étranglement que le ventilateur à aubes recourbées vers l’arrière, pour lequel la puissance absorbée ne diminue que peu à cause de l’augmentation de pression statique.
Dans le cas de ventilateurs hélicoïdes, ce type de régulation peut devenir problématique lorsque le point de fonctionnement se déplace encore plus vers la gauche, car on peut atteindre facilement la zone de fonctionnement instable.
Si, pour un ventilateur, on choisit une régulation par étranglement, il faut alors veiller à ce que le point de fonctionnement le plus fréquent se trouve dans la zone de rendement optimal. Dans tous les cas, il faut choisir le débit maximal si possible à droite de la plage de rendement optimale. On reste ainsi dans le voisinage de ce dernier, lorsque la courbe caractéristique du circuit se déplace vers la gauche.
Réglage par by-pass
Le by-pass consiste à court-circuiter une partie du débit de ventilation via un conduit de dérivation, pour diminuer le débit alimentant les locaux.

Lorsque le registre de by-pass s’ouvre, le débit dans le réseau principal chute de q1 à q2. Le débit passant dans le by-pass est égal à (q3 – q2). Le rectangle hachuré compris entre (q3 – q2) est considéré comme la perte de ce système de réglage.
Régulation par aubage mobile de prérotation
Un aubage mobile de prérotation (appelé aussi distributeur, ventelles, aubes directrices) est un dispositif muni d’ailettes orientables au moyen d’un servomoteur. Il permet d’incliner les filets de fluide gazeux avant leur entrée dans la roue.
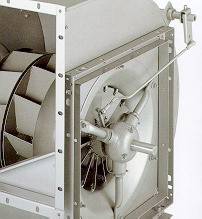
Aubage de prérotation sur l’ouïe d’aspiration.
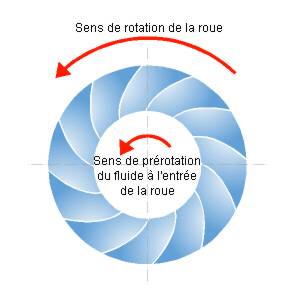
Si le sens de prérotation de la veine de fluide est le même que le sens de rotation de la roue, on peut réduire le débit par rapport au débit nominal. Pour les ventilateurs hélicoïdes, on peut aussi opposer les deux sens de rotation. Dans ce cas, il y a augmentation du débit par rapport au débit nominal. Ce dernier réglage ne fonctionne pas pour les ventilateurs centrifuges.
La régulation par ventelles ne convient que pour des ventilateurs centrifuges à aubes recourbées vers l’arrière ou des ventilateurs hélicoïdes. Dans le cas de ventilateurs centrifuges à aubes recourbées vers l’avant, le mouvement rotatoire influencerait beaucoup trop l’écoulement tridimensionnel dans la roue, ce qui entraînerait une trop forte diminution du rendement.
Il existe différents types d’aubages mobiles de prérotation : intégré en amont du pavillon d’aspiration ou directement monté dans ce dernier.

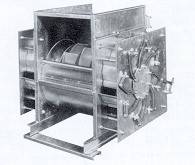
Ventilateur centrifuge avec aubage de prérotation axial.
Ventilateur centrifuge à double ouïe d’aspiration avec aubage de prérotation radial.
A chaque angle de prérotation correspond une nouvelle courbe caractéristique du ventilateur qui va se situer en dessous de la courbe caractéristique correspondant à un aubage entièrement ouvert.

Si son angle de positionnement est nul, l’aubage de prérotation est réputé ouvert. S’il est égal à 90°, il est réputé fermé. Des mesures ont montré qu’entre les courbes caractéristiques d’un ventilateur sans aubage de prérotation et avec aubage incorporé en position d’ouverture maximale la différence était si faible qu’on pouvait facilement la négliger dans la pratique.
Un aubage de prérotation permet d’obtenir n’importe quelle courbe de réglage. Toutefois, et afin de conserver une caractéristique de réglage aussi sensible que possible, la courbe de réglage désirée doit pouvoir être obtenue avec un angle de calage de l’aubage ne dépassant pas 80°. En fonction du point de détermination de la courbe de réglage, cette position est obtenue pour un débit se situant entre 50 et 60 % du débit maximal. Notons en outre que lorsque la prérotation initiale est trop importante, l’entrée dans la roue ne peut plus se faire sans à-coups, si bien que les pertes deviennent encore plus importantes et qu’il faut alors compter sur une diminution du rendement. C’est pour cela que l’utilisation la plus rentable d’un aubage de prérotation se situe, à vitesse de rotation constante, entre 60 % et 100 % du débit nominal.
Pour obtenir un plus grande plage de réglage, on peut combiner des aubages de prérotation et des moteurs à deux vitesses. Pour des raisons de sensibilité de la régulation, on veillera à ce que le passage sur la plus petite vitesse de rotation s’effectue avant que l’angle de calage de l’aubage de prérotation n’atteigne 80°.
Réglage de la vitesse de rotation du ventilateur par variation de vitesse du moteur
La vitesse de rotation (n) d’un moteur asynchrone dépend de la fréquence du réseau (f), du nombre de paires de pôles du moteur (P) et du glissement (s) :
n [tr/min] = f [Hz ] x 60 x (1-s [-]) / P [-]
La régulation de la vitesse de rotation se fait en pratique en modifiant un de ces 3 paramètres.
Modification du nombre de paires de pôles
Il existe trois manières de modifier le nombre de paires de pôles d’un moteur asynchrone à cage d’écureuil. Le stator peut être équipé :
- avec deux bobinages séparés ou plus ;
- avec un bobinage à nombre de pôles commutable ;
- avec une combinaison des deux solutions ci-dessus.
| Nombre de paires de pôles | Vitesse synchrone à 50 Hz [tr/min] |
| 1 | 3 000 |
| 2 | 1 500 |
| 3 | 1 000 |
| 4 | 750 |
| 1 + 2 | 3 000 / 1 500 |
| 2 + 3 | 1 500 / 1 000 |
| 3 + 4 | 1 000 / 750 |
| 2 + 3 + 4 | 1 500 / 1 000 / 750 |
| 3 + 4 + 5 | 1 000 / 750 / 600 |
Théoriquement, les combinaisons de vitesse de rotation sont illimitées. Cependant, pour des raisons de place, on voit rarement un nombre de paires de pôles supérieur à 4 (8 pôles) en combinaison avec d’autres bobinages. Autrement, les moteurs deviendraient trop gros pour une puissance donnée. Pour cette raison, il faudrait plus souvent envisager d’utiliser deux moteurs différents, directement reliés aux deux extrémités de l’arbre du ventilateur.
|
Bobinages séparés |
|
| Les moteurs à bobinages séparés sont plus gros à puissance égale.
Par exemple, les moteurs à deux bobinages séparés utilisés en technique de ventilation peuvent délivrer à la grande vitesse, en première approximation, le 80 % de la puissance que pourrait délivrer un moteur de même taille à un seul bobinage, tournant au même régime. Le rendement d’un moteur à plusieurs bobinages, fonctionnant à la grande vitesse, est toujours un peu plus faible que le rendement d’un moteur à un seul bobinage délivrant la même puissance et tournant à la même vitesse. De plus, avec plusieurs bobinages, la vitesse la plus élevée a le meilleur rendement. Pour les autres vitesses, le rendement est plus faible, il diminue avec l’augmentation du nombre de pôles.
Commutation entre deux séries de pôles : petite vitesse et grande vitesse. |
|
|
Pôles commutables |
|
| Il existe plusieurs possibilités de rendre un bobinage commutable et obtenir ainsi une meilleure utilisation de la taille du moteur. Par souci de simplicité du système de commutation, on utilise en pratique soit le couplage Lindstrôm-Dahlander ou le couplage à modulation d’amplitude de pôle (PAM).
Le couplage Dahlander permet un rapport de nombre de paires de pôles de 1 : 2. Le couplage PAM autorise d’autres possibilités et permet une meilleure utilisation de la taille du moteur.
Commutation des raccordements des moteurs Dahlander : raccordement en série (petite vitesse), raccordement en parallèle (grande vitesse). |
|

Modification du glissement
Pour augmenter le glissement d’un moteur, il faut augmenter l’écart entre le champ magnétique tournant et la vitesse de rotation du moteur. Le principe de base, commun à tous ces systèmes est de faire chuter la tension, la fréquence et le nombre de pôles restants identiques.
Pour cela, on utilise des transformateurs (appelés auto-transformateurs) commandés par servomoteur ou des systèmes de hachage par triacs/thyristors (appelés régulateurs de vitesse électroniques).


Variateurs de tension manuel et automatique.
La grande majorité de ces systèmes équipent seulement de petits ventilateurs. Ils permettent un réglage de 0 à 100 %.
Attention, il faut cependant que le moteur soit au départ conçu pour fonctionner à tension variable. En effet sur les moteurs standards, la baisse de tension a pour conséquence une augmentation de l’intensité inadmissible pour le moteur.
Le système de réglage par hachage de phase crée des harmoniques qui non seulement perturbent le fonctionnement du moteur, mais polluent le réseau de distribution. Le réglage par transformateur ne crée par contre pas d’harmonique.
Le prix est le principal avantage de ces systèmes de régulation.
Les systèmes par transformateurs permettent une adaptation du régime par paliers, alors que les systèmes à hachage de phase autorisent un réglage progressif continu. Il faut toutefois prendre garde à ne pas démarrer sur un petit régime au risque de détruire le moteur.
Les performances énergétiques de ces systèmes ne sont pas bonnes, quoique quand même préférables à par exemple une régulation par étranglement ou by-pass.
Convertisseurs de fréquence
La régulation de vitesse la plus favorable du point de vue consommation d’énergie est celle obtenue avec un convertisseur de fréquence.

Gamme de convertisseurs de fréquence.
Les convertisseurs de fréquence comportent généralement les éléments suivants
- Un redresseur transformant la tension alternative 50 Hz du réseau en tension continue.
- Un onduleur transformant la tension continue fournie par le redresseur en une tension alternative (mono- ou triphasée) de fréquence réglable alimentant le ou les moteurs. Cette tension n’est pas une vraie sinusoïde : la sinusoïde est “reconstituée” par des trains d’impulsions de longueur modulée et de hauteur fixe.
 L’amplitude de la tension est par ailleurs également réglable. C’est ce qui permet d’ajuster le cos φ pour les faibles charges et d’optimaliser les caractéristiques de démarrage en fonction du couple demandé.
L’amplitude de la tension est par ailleurs également réglable. C’est ce qui permet d’ajuster le cos φ pour les faibles charges et d’optimaliser les caractéristiques de démarrage en fonction du couple demandé.
- Un régulateur permettant de piloter le convertisseur au moyen d’un signal de consigne variable. Ceci permet de faire dépendre la vitesse de n’importe quelle loi choisie en fonction de l’application. Par exemple :
- vitesse fonction d’une différence de pression;
- vitesse fonction d’une température;
- vitesse fonction d’une différence de température.
Mis à part le réglage de la vitesse, le convertisseur de fréquence présente les avantages suivants :
- Grande fiabilité.
- Permet le contrôle du démarrage du moteur (couple et intensité de courant). De ce fait, les contacteurs de démarrage étoile-triangle et leur commande ne sont pas nécessaires (économie de matériel, de place dans le tableau et de main-d’œuvre, dans le cas d’installations nouvelles).
- Permet de fixer des limites hautes et basses de vitesse, pour définir une plage de réglage.
- La vitesse nominale correspondant aux 50 Hz du réseau peut être dépassée.
- Le cos φ est bon (environ 0,9). Une compensation n’est donc pas nécessaire.
- Permet d’éviter des entraînements intermédiaires (poulies- courroies).
- Offre la possibilité d’utiliser un convertisseur de puissance plus faible que la puissance nominale du moteur (adaptation à la puissance nécessaire dans les conditions réelles d’utilisation).
- Peut régler la vitesse de plusieurs moteurs.
- Accroît la longévité des roulements.
- Permet de résoudre les problèmes de bruits dus à la mise en résonance de certaines parties de l’installation en ne modifiant que légèrement la vitesse de rotation.
- création d’harmoniques et d’interférences radio. Ceux-ci peuvent être gênants pour :
- Le réseau où ils engendrent des perturbations, nuisibles en particulier pour l’informatique. L’adjonction d’un filtre peut être nécessaire (coût supplémentaire).
- Les moteurs, car ils provoquent une augmentation des pertes par effet Joule, donc une élévation de température pouvant nécessiter une diminution de la puissance ou l’adjonction d’un ventilateur supplémentaire à vitesse fixe, surtout aux basses vitesses (< à 30 % du régime nominal). Ce “déclassement”, de l’ordre de 10 %, peut être ramené à 5 % par l’utilisation de filtre antiharmonique.
- En principe, le marquage CE garantit l’absence de ce type de problème et le respect de la directive européenne EMC. Cependant, la conformité des appareils portant ce marquage n’est pas vérifiée par un organisme tiers mais apposé par le fabricant.
- Le rendement du convertisseur n’est pas de 100 % ; il est moindre à faible charge (0,75 à 20 Hz, par exemple) qu’à la puissance nominale où il peut dépasser 0,95. En outre lorsque le ventilateur est arrêté, il vaut la peine de mettre également hors service le convertisseur, de manière à supprimer les pertes de veille qui deviennent non négligeables lorsqu’on considère la consommation annuelle.
- Sollicitation plus importante des isolants du moteur à cause des ondes de tension à flanc raide et à fréquence élevée, servant à générer la sinusoïde.
Lors d’une demande de prix et pour les comparaisons du matériel proposé par les différents fournisseurs, il faut être attentif aux possibilités de réglage et de signalisation offertes ainsi qu’au degré des inconvénients. En particulier, si le montage d’un filtre d’harmoniques est nécessaire, il peut renchérir sensiblement l’équipement.
Il existe 2 principaux types de convertisseurs de fréquence : le convertisseur à circuit intermédiaire piloté en fonction d’un courant et le convertisseur à circuit intermédiaire piloté en fonction d’une tension.
Pour autant que la puissance ne dépasse pas 500 kW, les deux systèmes sont d’un coût d’investissement à peu près identique.
Par contre, du point de vue rendement, celui d’un convertisseur à circuit intermédiaire tension est meilleur dans une plage de réglage allant de 100 % à 60 % de la vitesse de rotation nominale, alors qu’un convertisseur à circuit intermédiaire intensité est plus intéressant pour la plage de réglage allant de 60 % à 30 % de la vitesse de rotation nominale.
Variation de l’angle de calage des aubes des ventilateurs hélicoïdes
Si l’on excepte les petits ventilateurs régulés par transformateur, le système de régulation consistant à agir sur l’angle de calage des aubes de la roue constitue le moyen le plus courant de régulation d’un ventilateur hélicoïde.
À chaque angle de calage des aubes de la roue correspond, à vitesse de rotation constante, une nouvelle courbe caractéristique de ventilateur.
Il en résulte que, rapporté à la puissance nécessaire sur l’arbre du ventilateur, la puissance absorbée est très favorable.
Un autre avantage du système à aubage de prérotation provient de ce qu’il est tout à fait possible de faire varier le débit-volume entre 100 % et 0 %. Lorsque l’on désire maintenir un débit constant, ce mode de réglage ne pose aucun problème.
Il n’y a en fait que si on veut maintenir une pression constante qu’il faut prendre des précautions pour éviter la limite de pompage. Pour cela, il existe divers équipements de contrôle permettant d’éviter tout débordement dans la zone de pompage. Si le point de fonctionnement venait à se rapprocher de la zone critique, il y aurait immédiatement correction de l’angle de calage des aubes de telle façon que ce point de fonctionnement revienne vers la zone stable.
Quant à l’entretien, il est des plus réduits puisqu’il se résume à assurer une lubrification par bague de graissage.
Comparaison
Critères de comparaison
Les critères de choix d’un système de réglage sont en autres :
- la plage de réglage,
- l’économie d’énergie,
- le bruit.
Plage de réglage
|
Plage de réglage des différents systèmes de régulation des ventilateurs |
|||
| Plage possible | Plage recommandée | ||
| Ventilateurs centrifuges et hélicoïdes | Etranglement | 100 à 70 % | 100 à 90 % |
| By-pass | 100 à 0 % | 100 à 80 % | |
| Prérotation | 100 à 40 % | 100 à 60 % | |
| Boîte de vitesse | 100 à 10 % | 100 à 20 % | |
| Vitesse du moteur | 100 à 20 % | 100 à 20 % | |
| Ventilateurs hélicoïdes | Calage des aubes | 100 à 0 % | 100 à 0 % |
Tous les modes de réglage ne conviennent pas en fonction de la courbe de réglage choisie. En effet, lorsque le point de fonctionnement se déplace fortement vers la gauche, on risque de tomber dans la zone de fonctionnement instable du ventilateur, provoquant ainsi des bruits nuisant au confort.
Ce sera le cas par exemple :
- Lorsque l’on désire maintenir une pression constante à la sortie du ventilateur par exemple par variation de vitesse.
- Lorsque l’on régule par étranglement un ventilateur hélicoïde.
- Lorsque l’on fait varier les débits par variation de vitesse et que l’on désire maintenir une pression constante dans un local (cas des salles blanches). Dans ce cas, seul la variation de l’angle de calage des aubes et les aubages de prérotation peuvent convenir sur une grande plage de réglage du débit.
Réglage par variation de vitesse dans les installations à pression externe constante.
Efficacité énergétique
Pour obtenir un même débit, la puissance absorbée par le moteur peut être tout à fait différente en fonction du système de réglage choisi.
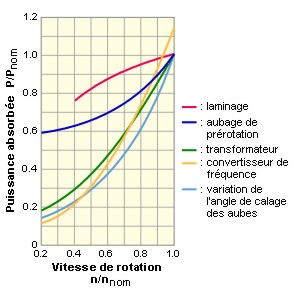
Ces courbes ont été établies pour des ventilateurs centrifuges à aubes arrières. Elles ne sont donc qu’indicatives pour les autres ventilateurs. La variation de l’angle de calage des aubes des ventilateurs hélicoïdes a été intégrée au graphe à titre de comparaison.
La régulation par registre de laminage ne conduit pas à des économies d’énergie importantes. Étant donné son faible coût d’investissement, elle peut cependant être utilisée pour de très faibles diminutions de débit et dans le cas de ventilateurs à aubes recourbées vers l’avant. Notons cependant que pour des petits ventilateurs, la régulation par étranglement peut, dans certains cas, être énergétiquement meilleure que la régulation de la vitesse de rotation (la différence peut être de 15 %), car les pertes de celle-ci pour des petits moteurs et de petits écarts par rapport au débit nominal, peuvent être plus grandes.
Une régulation par by-pass n’a pas sa place dans le cadre d’une utilisation rationnelle de l’énergie électrique, parce que si ce système permet de diminuer le débit dans le réseau de gaines, celui du ventilateur augmente entraînant, avec lui une augmentation de la puissance absorbée et de la consommation. L’augmentation de puissance absorbée peut être très conséquente et surcharge même dans certains cas le moteur.
La régulation par aubage mobile de prérotation permet une diminution importante de la puissance absorbée. Cependant, plus le débit diminue par rapport au débit nominal, plus le rendement du ventilateur diminue. Cette diminution est raisonnable pour les petites variations de débit. Pour des plus grandes plages de réglage la régulation par variation de vitesse est donc préférable.
La solution de réglage la plus élégante pour un ventilateur est celle par régulation de la vitesse de rotation. En effet, lorsque le réglage du débit doit suivre la courbe caractéristique du circuit de distribution, la variation de vitesse du ventilateur permet au ventilateur de toujours travailler à son meilleur rendement. Par contre, lorsque la pression doit rester constante, l’économie d’énergie est moins intéressante.
Sauf pour les très faibles variations de débit, c’est la solution du convertisseur de fréquence qui est énergétiquement le plus efficace. Les solutions par transformateurs ou modification du nombre de pôles présente de plus mauvais rendements (quoique meilleurs que le laminage et le by-pass).
Les progrès actuels et futurs dans le domaine de la régulation des moteurs donnent les meilleures chances d’avenir au ventilateur avec réglage de la vitesse de rotation.
Pour les ventilateurs hélicoïdes, la variation de l’angle de calage des aubes présente de très bon rendements. On peut dire que, du point de vue puissance absorbée, une régulation par variation de l’angle de calage des aubes se situe entre une régulation par aubage de prérotation et une régulation du moteur.
|
Classification des modes de réglage (dans l’ordre décroissant) |
|||
| Économie d’énergie | Investissement | ||
| 1 | calage des aubes | 1 | variation de vitesse |
|---|---|---|---|
| 2 | variation de vitesse | 2 | calage des aubes |
| 3 | aubage de prérotation | 3 | aubage de prérotation |
| 4 | registre | 4 | registre |
Bruit

Les registres d’étranglement posent clairement des problèmes de bruit et ne doivent donc être utilisés que pour de faibles réduction de débit. Cet inconvénient s’ajoute à la mauvaise efficacité énergétique du système.
Les aubages de prérotation, énergétiquement efficaces, peuvent aussi poser des problèmes de bruit.
Le comportement acoustique d’un système de régulation de ventilateur hélicoïde par variation de l’angle de calage des aubes est excellent et se rapproche de celui d’un système de régulation de la vitesse d’un moteur.
La diminution de la vitesse du ventilateur est quant à elle très favorable à la diminution de la puissance sonore.
Notons que le bruit du groupe moto-ventilateur ne peut être réduit à une valeur inférieure à celle du bruit du seul moteur utilisé.

Auteur : les anciens
Notes :