

Sommaire

Généralités
On peut ranger les types d’ascenseurs électriques dans deux catégories principales :
- les ascenseurs à traction à câbles;
- les ascenseurs hydrauliques.
Les ascenseurs à tractions à câbles sont de loin ceux le plus répandu au niveau du parc machine. C’est une des raisons pour laquelle on détaillera plus la motorisation des ascenseurs à traction à câbles. De plus, énergétiquement parlant, la motorisation des ascenseurs hydrauliques a des rendements assez faibles (de l’ordre de 20 %) et, de par l’absence entre autres de contre-poids, les moteurs hydrauliques consomment plus et ont des appels de puissance au démarrage beaucoup plus importants.
Le tableau ci-dessous montre un comparatif des performances énergétiques de différents types de motorisation :
| Type de motorisation | Rendement | Courant nominal | Courant de démarrage | |
| Moteur hydraulique | de l’ordre de 20 % | 3 In | 12 à 18 In | |
| Moteur-treuil à vis sans fin | ancienne génération | de l’ordre de 45 % | In | 2 à 3,5 In |
| nouvelle génération | 60 à 65 % | |||
| Moteur sans treuil (“gearless”) | de l’ordre de 78 % | ** | ** | |
| Moteur-treuil planétaire | de l’ordre de 97 % | ** | ** | |
Comme nous le verrons ci-dessous, l’efficacité énergétique des systèmes de motorisation des ascenseurs dépend surtout du type de moteur d’entraînement accouplé :
- au treuil pour les ascenseurs à traction,
- à la pompe pour les ascenseurs hydrauliques.
Un réducteur planétaire, par exemple, peut être accouplé à :
- un moteur à courant continu à excitation indépendante ou shunt,
- un groupe Ward Léonard,
- un moteur à courant alternatif asynchrone à démarrage :
- étoile-triangle,
- à deux vitesses,
- commandé par un variateur de fréquence,
- …
- un moteur à courant alternatif synchrone à démarrage par variateur de fréquence;
- …
Suivant la combinaison du moteur et du réducteur planétaire, les consommations peuvent être sensiblement différentes. Dans un souci de trouver la meilleure adéquation, il sera nécessaire de prendre en compte :
- le rendement mécanique de l’ensemble,
- le rendement électrique du circuit puissance (alimentation et moteur).
Les moteurs-treuils ou moteur à traction
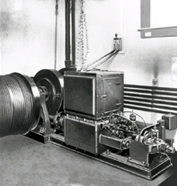
Les moteurs-treuils à vis sans fin à une ou deux vitesses

Moteur-treuil à vis sans fin.
À l’heure actuelle, les moteurs-treuils avec vis sans fin sont abandonnés au profit des moteurs à attaque directe (sans réducteur ou “gearless).
Dans ce type de motorisation, la vis sans fin entraîne beaucoup de pertes mécaniques et, par conséquent, des consommations électriques plus importantes.
Au début de l’utilisation des vis sans fin, les rendements énergétiques de l’ensemble moteur-treuil étaient de l’ordre de 20 %. Avec le perfectionnement des outils, des lubrifiants, …, les rendements se sont nettement améliorés pour atteindre les 45 % et, même plus récemment, 60 à 65 %.
Les moteurs électriques couplés au treuil à vis sans fin étaient généralement des moteurs à courant continu à excitation indépendante ou shunt avec la faculté bien connue de pouvoir faire varier très facilement la vitesse de rotation.
Les moteurs électriques à courant alternatif utilisés avec ce type de réducteur sont en principe des moteurs à deux vitesses. A l’heure actuelle, on peut encore remarquer ce type de moteur-treuil lorsqu’on se trouve dans la cabine :
- au démarrage, la vitesse est plus lente (petite vitesse),
- pour atteindre la vitesse de déplacement optimale, le moteur passe en seconde vitesse en provoquant un léger choc d’accélération (passage de petite en grande vitesse).
Les moteurs-treuils à vis sans fin ont les principaux avantages et inconvénients suivants :
|
|
(+)
(-)
|
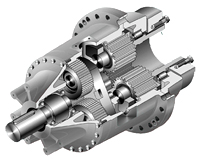
Les moteurs-treuils planétaires

Moteur-treuil planétaire.
Les appareils à treuil planétaire utilisent le système de réduction de vitesse par engrenages planétaires. Accouplés à un moteur électrique, ils permettent d’avoir un rapport de réduction appréciable pour obtenir une plage de vitesse compatible avec le confort et l’efficacité de déplacement souhaitée.
Sans rentrer dans les détails, le treuil planétaire est composé d’un assemblage mécanique complexe d’engrenages. Il est basé sur le principe de gravitation des planètes autour du soleil où :
- Le soleil est l’engrenage calé sur l’arbre de sortie du réducteur et couplé avec la roue à câble de l’ascenseur.
- Les trois engrenages planétaires tourne sur eux-même et autour de l’engrenage soleil à la manière de notre système solaire.
- L’engrenage couronne est celui qui, relié au moteur d’entraînement, fournit le couple moteur.
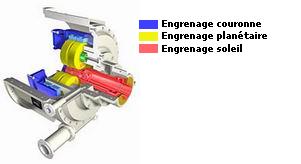
Réducteur planétaire.
Ce système a un rendement mécanique de l’ordre de 97 à 98 % permettant, pour autant que les moteurs d’entraînement soient performants, d’obtenir des rendements énergétiques globaux intéressants au niveau du moteur-treuil (de l’ordre de 80 %).
Les réducteurs planétaires peuvent être accouplés à des moteurs électriques :
- à courant continu (grande plage de variation de vitesse),
- à courant alternatif asynchrone à deux vitesses,
- à courant alternatif asynchrone commandé par un variateur de fréquence.
Les moteurs-treuils planétaires ont les principaux avantages et inconvénients suivants :

|
|
(+)
(-) |
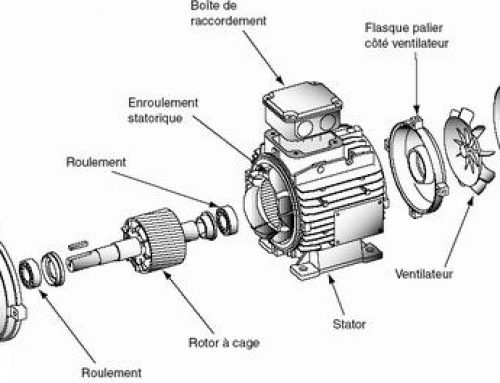
Les moteurs à attaque directe (“Gearless” ou sans treuil)

Moteur gearless classique.
Les moteurs à attaque directe sans réducteur ont fait leur apparition avec la venue des variateurs de fréquence. Les installations deviennent tellement compactes qu’ils est possible à l’heure actuelle de se passer de local des machines sur le toit des immeubles.
Ce système est énergétiquement performant principalement de part la présence d’un variateur de fréquence qui optimise la consommation énergétique; la réduction des pertes mécaniques vu l’absence de réducteur contribuant aussi à l’optimisation de l’efficacité énergétique.
Certains constructeurs annoncent des rendements énergétiques de l’ordre de 80 %.
Les moteurs à attaque directe ont les principaux avantages et inconvénients suivants :

|
|
(+)
(-)
|
Les motopompes hydrauliques

Les groupes motopompes utilisés dans les ascenseurs hydrauliques sont composés essentiellement :
- d’une pompe hydraulique de mise en pression de l’huile dans le cylindre,
- d’un moteur électrique d’entraînement de la pompe,
- d’une vanne de réglage de débit pour la descente de l’ascenseur,
- d’un réservoir à huile,
- d’une régulation,
- …
La consommation électrique du moteur d’entraînement est due en grande partie au fait que, dans le principe même d’un ascenseur hydraulique, il n’y a pas de contre-poids. De plus, dans une moindre mesure et pour une même charge, les consommations :
- des motopompes centrifuges, par exemple, varient avec le cube de la vitesse,
- des moteurs-treuils, par exemple, varient proportionnellement à la vitesse.



![Types de gestion du trafic [ascenseurs]](https://energieplus-lesite.be/wp-content/uploads/2020/03/ascenseurs-trafic-bon-500x383.jpg)

Auteur : les anciens
Mars 2009 : Thibaud
Notes :
Juin 2009 : mise en page et liens internes, Sylvie