

Sommaire

(Source : “L’essentiel sur les variateurs de vitesse”; Danfoss drive a/s).
Principe de base des variateurs de vitesse
Depuis la venue de la technologie des semi-conducteurs, la variation de vitesse électronique des moteurs électriques a pris le dessus sur les anciens systèmes tels que les groupes Ward-Léonard.
Cette technologie, devenue fiable, part toujours du même principe : à partir d’une source, la plupart du temps triphasée alternative pour les ascenseurs, le variateur de vitesse va recréer en sortie :
- Une tension triphasée variable en fréquence et en amplitude pour les moteurs à courant alternatif.
- Une tension continue variable en amplitude pour les moteurs à courant continu.
Le variateur de vitesse est composé essentiellement :
- d’un redresseur qui, connecté à une alimentation triphasée (le réseau), génère une tension continue à ondulation résiduelle (le signal n’est pas parfaitement continu). Le redresseur peut être de type commandé ou pas,
- d’un circuit intermédiaire agissant principalement sur le “lissage” de la tension de sortie du redresseur (améliore la composante continue). Le circuit intermédiaire peut aussi servir de dissipateur d’énergie lorsque le moteur devient générateur,
- d’un onduleur qui engendre le signal de puissance à tension et/ou fréquence variables,
- d’une électronique de commande pilotant (transmission et réception des signaux) le redresseur, le circuit intermédiaire et l’onduleur.
Le variateur de vitesse est principalement caractérisé selon la séquence de commutation qui commande la tension d’alimentation du moteur. On a :
- les variateurs à source de courant (CSI),
- les variateurs à modulation d’impulsions en amplitude (PAM),
- les variateurs à modulation de largeur d’impulsion (PWM/VVC).
Fonction des variateurs de vitesse
Au niveau des ascenseurs, parmi la multitude de possibilités de fonctions qu’offrent les variateurs de vitesse actuels, on épinglera :
- l’accélération contrôlée,
- la décélération contrôlée,
- la variation et la régulation de vitesse,
- l’inversion du sens de marche,
- le freinage d’arrêt.
L’accélération contrôlée
Le profil de la courbe de démarrage d’un moteur d’ascenseur est avant tout lié au confort des utilisateurs dans la cabine. Il peut être soit linéaire ou en forme de “s”. Ce profil ou “rampe” est la plupart du temps ajustable en permettant de choisir le temps de mise en vitesse de l’ascenseur.
La décélération contrôlée
Les variateurs de vitesse permettent une décélération contrôlée sur le même principe que l’accélération. Dans le cas des ascenseurs, cette fonction est capitale dans sens où l’on ne peut pas se permettre de simplement mettre le moteur hors tension et d’attendre son arrêt complet suivant l’importance du couple résistant (le poids du système cabine/contre-poids varie en permanence); Il faut impérativement contrôler le confort et la sécurité des utilisateurs par le respect d’une décélération supportable, d’une mise à niveau correcte, …
On distingue, au niveau du variateur de vitesse deux types de freinage :
- En cas de décélération désirée plus importante que la décélération naturelle, le freinage peut être électrique soit par renvoi d’énergie au réseau d’alimentation, soit par dissipation de l’énergie dans un système de freinage statique.
- En cas de décélération désirée moins importante que la décélération naturelle, le moteur peut développer un couple moteur supérieur au couple résistant de l’ascenseur et continuer à entraîner la cabine jusqu’à l’arrêt.
La variation et la régulation de vitesse
Parmi les fonctionnements classiques des variateurs de vitesse, on distingue :
- La variation de vitesse proprement dite où la vitesse du moteur est définie par une consigne d’entrée (tension ou courant) sans tenir compte de la valeur réelle de la vitesse du moteur qui peut varier en fonction de la charge, de la tension d’alimentation, … On est en boucle “ouverte” (pas de feedback).
Boucle ouverte.
- La régulation de vitesse où la consigne de la vitesse du moteur est corrigée en fonction d’une mesure réelle de la vitesse à l’arbre du moteur introduite dans un comparateur. La consigne et la valeur réelle de la vitesse sont comparées, la différence éventuelle étant corrigée. On est en boucle “fermée”.
Boucle fermée.
L’inversion du sens de marche
Sur la plupart des variateurs de vitesse, il est possible d’inverser automatiquement le sens de marche. L’inversion de l’ordre des phases d’alimentation du moteur de l’ascenseur s’effectue :
- soit par inversion de la consigne d’entrée,
- soit par un ordre logique sur une borne,
- soit par une information transmise par une connexion à un réseau de gestion.
Le freinage d’arrêt
C’est un freinage de sécurité pour les ascenseurs :
- Avec des moteurs asynchrones, le variateur de vitesse est capable d’injecter du courant continu au niveau des enroulements statoriques et par conséquent stopper net le champ tournant; la dissipation de l’énergie mécanique s’effectuant au niveau du rotor du moteur (danger d’échauffement important).
- Avec des moteurs à courant continu, le freinage s’effectue au moyen d’une résistance connectée sur l’induit de la machine.
Le redresseur
Redresseur triphasé.
Les ascenseurs sont généralement alimentés par un réseau triphasé alternatif à fréquence fixe (50 Hz). La fonction du redresseur au sein du variateur de vitesse est de transformer la tension triphasée alternative en tension continue monophasée. Cette opération se réalise par l’utilisation :
- soit d’un pont de diodes, le redresseur est “non-commandé”,
- soit d’un pont de thyristors, alors le redresseur est commandés.
Le redresseur non commandé
Comme le montre la figure ci-dessous, des deux alternances d’une tension monophasée alternative (positive et négative), seule l’alternance positive passe à travers la diode entre les électrodes couramment appelées “anode” et “cathode”; on dit que la diode est “passante”.
Fonctionnement de la diode .
Pour obtenir une tension continue à la sortie du redresseur, il est nécessaire de trouver un système qui permette d’exploiter les deux alternances; c’est le pont de diodes.
Dans un redresseur triphasé non-commandé, le pont de diodes permet, comme le montre la figure ci-dessus, de générer une tension continue en redressant l’alternance négative de chaqu’une des trois tensions composées. On voit que la tension de sortie n’est pas tout à fait continue et comporte une ondulation résiduelle.
Redresseurs non-commandés.
La tension à ondulation résiduelle sortant du redresseur a une valeur moyenne de l’ordre de 1,35 fois la tension du réseau.
Tension à ondulation résiduelle.
Le redresseur commandé
Dans le redressement commandé d’une tension alternative, la diode est remplacée par le thyristor qui possède la particularité de pouvoir contrôler le moment ou il deviendra “passant” dans l’alternance positive. C’est la troisième électrode, appelée “gâchette”, qui, lorsqu’elle est alimenté sur commande par la régulation du redresseur, devient conductrice. Tout comme la diode, le thyristor est “bloquant” durant l’alternance “négative”.
Fonctionnement du thyristor.
On voit tout de suite l’intérêt du thyristor par rapport à la diode : on peut faire varier la valeur de la tension moyenne de sortie en contrôlant le moment où l’impulsion sera donnée sur la gâchette pour rendre le thyristor “passant”.
Dans un redresseur triphasé commandé, le pont de thyristors permet, comme le montre la figure ci-dessus :
- De générer une tension continue en redressant l’alternance négative de chaqu’une des trois tensions composées. On voit que la tension de sortie n’est pas tout à fait continue et comporte une ondulation résiduelle.
- De faire varier le niveau de tension moyenne à la sortie du redresseur.
Redresseurs commandés.
Tension de sortie du redresseur.
Le circuit intermédiaire
Circuit auxiliaire.
Ce circuit joue plusieurs rôles suivant les options prises sur le type de variateur dont principalement le lissage en courant ou en tension du signal de sortie du redresseur et le contrôle du niveau de tension ou de courant d’attaque de l’onduleur. Il peut aussi servir à :
- découpler le redresseur de l’onduleur,
- réduire les harmoniques,
- stocker l’énergie due aux pointes intermittentes de charge.
On différentie le circuit intermédiaire à :
- À courant continu variable lorsque le redresseur est commandé (variation de la tension de sortie du redresseur).
- À tension continue variable ou constante lorsque le redresseur est respectivement commandé ou pas.
- À tension variable lorsque le redresseur est non-commandé.
Le circuit intermédiaire à courant continu variable
Ce type de circuit intermédiaire caractérise les variateurs à source de courant. Il est composé d’une bobine (ou self) de lissage “passe bas” (filtration des basses fréquences) permettant de réduire l’ondulation résiduelle. En d’autres termes la bobine transforme la tension de sortie du redresseur à ondulation résiduelle en un courant continu.

Circuit intermédiaire à courant continu variable.
Le circuit intermédiaire à tension continue constante ou variable
Ce type de circuit intermédiaire caractérise les variateurs à source de tension. Il est composé d’une bobine (ou self) de lissage “passe bas” (filtration des basses fréquences) et d’un condensateur “passe haut” (filtration des hautes fréquences) permettant de réduire l’ondulation résiduelle.
Pour un redresseur commandé, le circuit intermédiaire transforme la tension de sortie à ondulation résiduelle du redresseur en tension continue d’amplitude variable.
Pour un redresseur non-commandé, la tension à l’entrée de l’onduleur est une tension continue dont l’amplitude est constante.
Circuit intermédiaire à tension continue constante ou variable.
Le circuit intermédiaire à tension variable
À l’entrée du filtre est ajouté un hacheur composé d’un transistor et d’une diode “roue libre”. Dans ce cas, le circuit intermédiaire transforme la tension continue de sortie du redresseur à ondulation résiduelle en une tension carrée lissée par le filtre. Il en résulte la création d’une tension variable suivant que le pilote du hacheur rende le transistor “passant” ou pas.
Circuit intermédiaire à tension variable.
L’onduleur
Onduleur triphasé.
L’onduleur constitue la dernière partie du variateur de vitesse dans le circuit puissance.
Alimenté à partir du circuit intermédiaire par :
- une tension continue variable ou constante,
Onduleur pour tension intermédiaire variable ou continue.
- un courant continu variable,
Onduleur pour courant intermédiaire continu variable.
L’onduleur fournit au moteur une grandeur variable en tension ou en fréquence ou les deux en même temps suivant le cas. En effet, une alimentation de l’onduleur :
- En tension ou en courant continue variable, lui permet de réguler la vitesse du moteur en fréquence.
- En tension continue constante, lui impose de réguler la vitesse du moteur en tension et en fréquence.
Bien que les fonctionnements des onduleurs soient différents, la technologie reste plus ou moins identique. Pour une raison de souplesse de commande en fréquence, les onduleurs sont maintenant équipés de transistors haute fréquence plutôt que de thyristors. Ce type de transistor de puissance peut être allumé et éteint très rapidement et, par conséquent, couvrir une large plage de fréquence (entre 300 Hz et 20 kHz).
Modes de fonctionnement de l’onduleur
On distingue plusieurs modes de fonctionnement des onduleurs en fonction principalement du signal de sortie du circuit intermédiaire :
- le fonctionnement en modulation d’impulsion en amplitude (PAM : Pulse Amplitude Modulation),
- le fonctionnement en modulation de largeur d’impulsion (PWM : Pulse Width Modulation).
Mode de modulation en amplitude ou en largeur d’impulsion.
Modulation d’impulsion en amplitude
Ce type de modulation est utilisé lorsque le variateur de vitesse est à tension intermédiaire variable.
Comme on l’a vu dans le circuit intermédiaire :
- Pour les variateurs avec redresseurs non-commandés, un hacheur est nécessaire pour générer une tension variable au niveau de l’onduleur.
- Pour les variateurs avec redresseurs commandés, la variation de l’amplitude de la tension est générée par le redresseur lui-même.
Circuit intermédiaire à tension variable par le hacheur.
Quel que soit le système, l’onduleur reçoit à son entrée une tension continue variable en amplitude. Dans ce cas, l’onduleur, lui, ne fait varier que la fréquence d’allumage et d’extinction des thyristor ou des transistors en fonction du niveau de la tension d’entrée pour recréer une tension sinuzoidale (dans le cas d’un moteur à courant alternatif).
Modulation de largeur d’impulsion (PWM)
Ce type de modulation est souvent utilisé pour générer une tension triphasée à fréquence et tension variables.
Il existe 3 manières de gérer la commutation des thyristors ou des transistors de puissance :
- PWM à commande par sinusoïde,
- PWM synchrone pour limiter les harmoniques,
- PWM asynchrone pour améliorer la réaction du moteur à toute modification rapide de la commande du variateur de fréquence.
Dans un souci de clarté, seule la PWM à commande par sinusoïde est expliquée ci-dessous :
Le principe de commande de l’onduleur réside dans l’utilisation d’un comparateur de tensions. Ce comparateur superpose à trois tensions sinusoïdales de référence une tension de forme triangulaire. La fréquence des trois sinusoïdes de référence correspondent à celle des tensions souhaitées à la sortie de l’onduleur. Les intersections entre les sinusoïdes et l’onde triangulaire détermine l’allumage ou l’extinction des thyristors (ou des transistors de puissance) selon le cas. Il en résulte un temps d’impulsion “passante” ou “non-passante” variable reconstituant un courant sinusoïdal en sortie du variateur de vitesse.
Principe PWM à commande par sinusoïde.
Attention, dans ce type de commande, il faudra être attentif à la génération d’harmoniques responsables de perturbation du réseau amont. Dans ce cas, une commande PWM synchrone limite la création d’harmoniques.
Le circuit de commande
Le circuit de commande ne fait pas partie du circuit puissance du variateur de vitesse. Ce circuit doit garantir quatre fonctions essentielles :
- La commande des semi-conducteurs du variateur de vitesse.
- L’échange d’informations de commande, de régulation et d’analyse avec les périphériques.
- Le contrôle des défauts (interprétation et affichage).
- La protection du variateur de vitesse et du moteur.
La venue des microprocesseurs a permis d’accroître la vitesse d’exécution des informations de commande et de régulation du circuit de commande vis à vis des autres circuits (circuit intermédiaire, onduleur, …).
Le circuit de commande est donc en mesure de déterminer le schéma optimum d’impulsions des semi-conducteurs pour chaque état de fonctionnement du moteur par rapport à la charge, au réseau, aux consignes de commande, …
La régulation de vitesse de moteurs triphasés à courant alternatif évolue selon deux principes de commandes différents :
- la commande U/f (Scalaire),
- la commande vectorielle de flux (VVC : Voltage Vector Control).
Ces principes déterminent la manière de programmation des algorithmes de commande et de régulation des variateurs de vitesses. Les deux méthodes présentent des avantages en fonction des exigences spécifiques des performances (couple, vitesse, …) et de la précision de l’entraînement.
La commande U/f (scalaire)
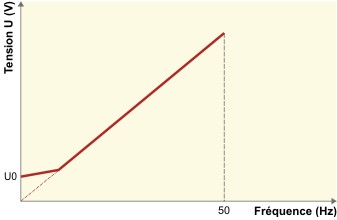
La commande U/f se base sur la mesure de grandeurs scalaires (valeurs d’amplitude en tension et en fréquence). C’est le système de commande de base des variateurs de fréquence standards.
Afin de garder un flux constant dans le moteur et donc aussi une variation de vitesse à couple constant la tension et la fréquence varient proportionnellement jusqu’à la fréquence nominale du moteur (50 Hz). Lorsque la tension nominale est atteinte, la tension ne sachant plus augmenter, il est toujours possible d’augmenter la fréquence; dans ce cas la variation se fait à puissance constante , le couple diminue avec la vitesse. Ce mode de fonctionnement est intéressant pour des charges à couple constant tels que les ascenseurs. En effet, le couple moteur “colle” mieux au profil du couple résistant; ce qui signifie que les consommations qui en découlent sont moindres.
Fonctionnement U/f constant.
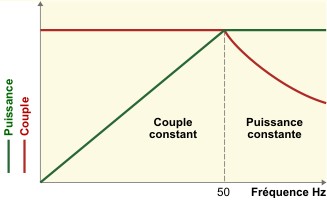
Fonctionnement à couple constant sous une fréquence de 50 Hz.
La figure ci-dessous montre les profils des courbes du couple en fonction de la vitesse pour différents rapports U/f :
Fonctionnement à couple constant.
La commande U/f a les avantages et les inconvénients suivants :
|
|
(+)
(-)
|
La commande vectorielle de tension (ou de flux)
Pour ce type de commande, il est nécessaire de fournir des indications précises sur les paramètres du moteur (encodage de la plaque signalétique).
La commande vectorielle en tension (VVC : Voltage Vector Control) agit selon le principe de calcul de la magnétisation optimale du moteur à différentes charges à l’aide de paramètres de compensation permettant de contrôler le glissement et la charge du moteur.
Comme son nom l’indique, la commande vectorielle en tension travaille avec les vecteurs de tension à vide et de compensation par rapport à la variation de la charge.
La commande vectorielle à champ orienté travaille avec les valeurs des courants actifs, de magnétisation (flux) et du couple. Par un modèle mathématique approprié, il est possible de déterminer le couple nécessaire au moteur en fonction des vecteurs du flux statorique et du courant rotorique et ce afin d’optimiser et réguler le champ magnétique et la vitesse du moteur en fonction de la charge.
La commande vectorielle de flux a les avantages et inconvénients suivants :
|
|
(+)
(-)
|
L’optimisation automatique de l’énergie
Dans des applications telles que celles des ascenseurs (faible charge des ascenseurs à traction), des économies d’énergie peuvent être réalisées en réduisant la force du champ magnétique et par conséquent les pertes dans le moteur. En effet, en général, pour des installations classiques, les moteurs sont surmagnétisés par rapport au couple à fournir.
Dans beaucoup d’applications, on pourra fixer le rapport U/f afin d’optimiser les consommations énergétiques. Un compromis sera trouvé entre l’économie d’énergie et les besoins réels du moteur en couple minimal pour un rotor bloqué (ou couple de décrochage).
L’économie d’énergie pour des systèmes moyens d’entraînement est de l’ordre de 3 à 5 % pour des faibles charges.


![Types de gestion du trafic [ascenseurs]](https://energieplus-lesite.be/wp-content/uploads/2020/03/ascenseurs-trafic-bon-500x383.jpg)


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Auteur : les anciens
Mars 2009 : Thibaud
Notes :
Juin 2009 : mise en page et liens internes, Sylvie
[…] mantiene el motor DC que, en esta ocasión, va asociado a un variador estático de velocidad ( variador electrónico ) cuya tecnología es más sencilla y económica a la vez que requiere poco mantenimiento y […]